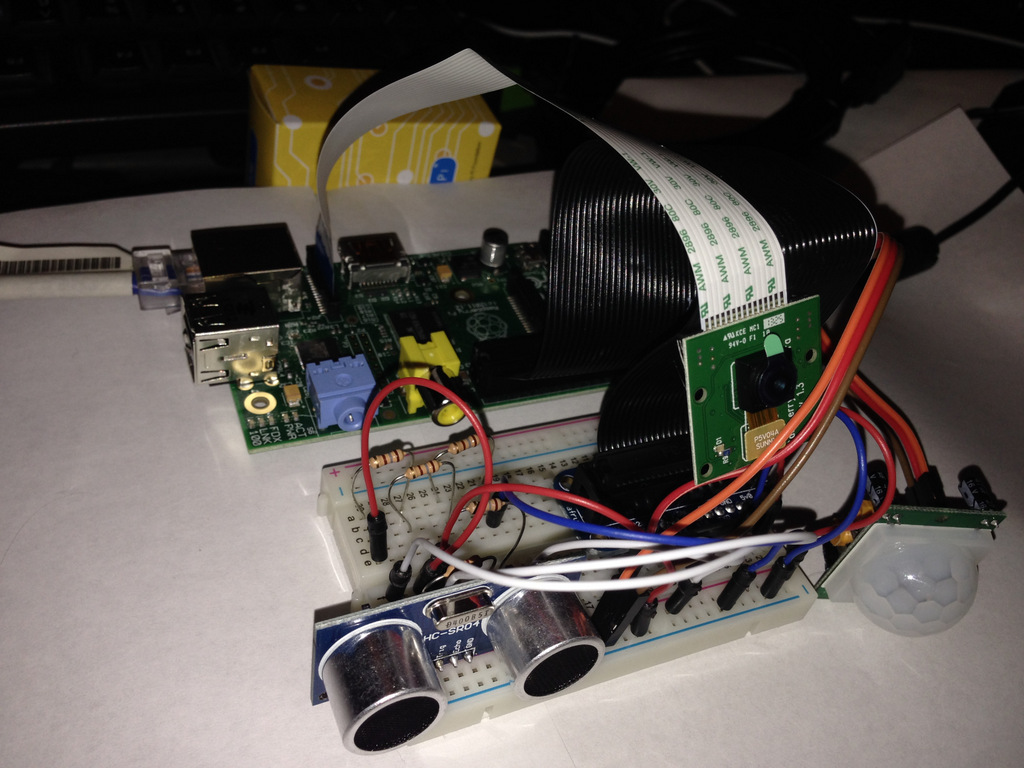
Almost every year, I try to select a fun project to do while off for Christmas. This year the project I selected was based on Raspberry Pi. Specifically I decided to build a device that would, when motion is detected, find the range to the motion using an ultrasonic rangefinder, take a picture using the camera module, and finally email me the results.
After just a few hours of work, I had separate proofs of concept working for each sensor written in Python. A short time after, I started combining all the proofs of concept into a consolidated script which I got working. Right now I am perfecting the classes for interfacing with the range finder and the motion detector and I am currently using picamera 0.8 for interfacing with the camera module. I’ve included a link to the git repository I’m using for source control below.
Equipment:
- Raspberry Pi Model B
- Raspberry Pi 5MP Camera Board Module
- HC-SR501 Human Sensor Module Pyroelectric Infrared
- SainSmart HC-SR04 Ranging Detector Mod Distance Sensor
- 5 180 ohm resistors
- Breadboard and miscellaneous connectors
Source Code: https://github.com/chaddotson/PiPy